TV denoising using convex and non-convex regularization
Ivan Selesnick selesi@nyu.edu Revised 2014, 2017
Contents
Start
clear rmse = @(x) sqrt(mean(abs(x).^2));
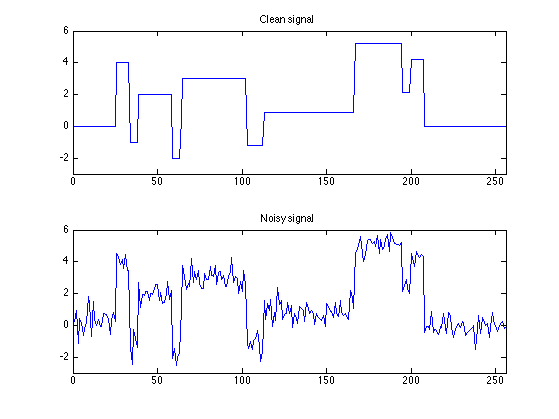
Create data
s = load('blocks.txt'); % blocks signal y = load('blocks_noisy.txt'); % noisy blocks signal sigma = 0.5; % sigma : standard deviation of noise N = length(s); % N : length of signal figure(1) clf subplot(2,1,1) plot(s) ax = [0 N -3 6]; axis(ax) title('Clean signal'); subplot(2,1,2) plot(y) axis(ax) title('Noisy signal');
TV Denoising
using L1 norm
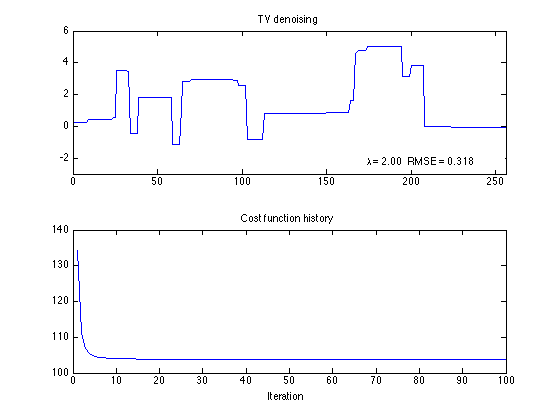
lam = 0.25 * sqrt(N) * sigma Nit = 100; [x_L1, cost] = tvd_mm(y, lam, Nit); rmse_L1 = rmse(x_L1 - s); txt_L1 = sprintf('\\lambda = %.2f RMSE = %.3f', lam, rmse_L1); figure(1) clf subplot(2,1,1) plot(x_L1) axis(ax) title('TV denoising'); axnote(txt_L1) subplot(2,1,2) plot(cost) title('Cost function history'); xlabel('Iteration')
lam =
2
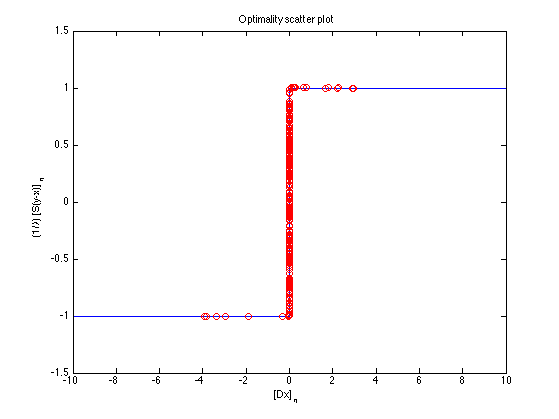
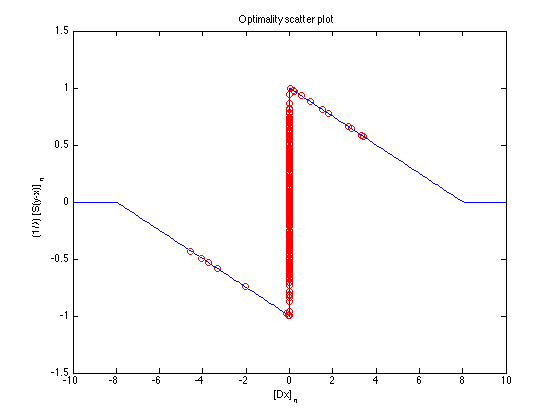
Optimality scatter plot
z = cumsum( x_L1 - y ) / lam; figure(1) clf m = 10; plot([-m 0 0 m], [-1 -1 1 1], diff(x_L1), z(1:end-1), 'o') xlim([-m m]) ylim([-1.5 1.5]) ylabel('(1/\lambda) [S(y-x)]_n') xlabel('[Dx]_n') title('Optimality scatter plot')
Verify tvd_ncvx function
The (convex) TV solution is retrieved when the 'L1' option is used in the tvd_ncvx function.
[x_, cost_] = tvd_ncvx_ver1(y, lam, 'L1', Nit); max(abs(x_L1 - x_)) % is zero max(abs(cost - cost_)) % is zero
ans =
0
ans =
0
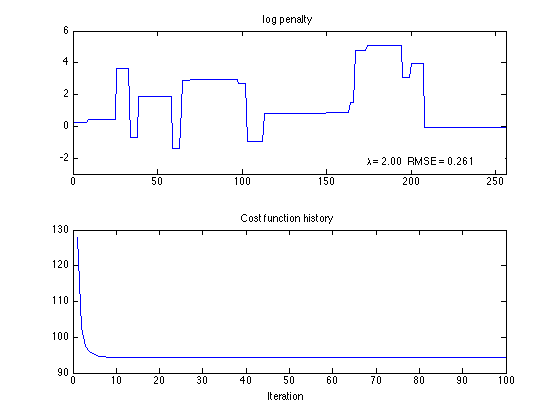
TV denoising using log penalty
[x_log, cost_log] = tvd_ncvx_ver1(y, lam, 'log', Nit); rmse_log = rmse(x_log - s); txt_log = sprintf('\\lambda = %.2f RMSE = %.3f', lam, rmse_log); figure(1) clf subplot(2,1,1) plot(x_log) axis(ax) title('log penalty'); axnote(txt_log) subplot(2,1,2) plot(cost_log) title('Cost function history'); xlabel('Iteration')
Optimality
z = cumsum( x_log - y ) / lam; a = 1/(4*lam); % maximal value for convexity [phi, dphi, wfun, ds] = penalty_funs('log', a); figure(1) clf m = 10; t = [linspace(-m, -eps, 100) linspace(eps, m, 100)]; plot(t, dphi(t), diff(x_log), z(1:end-1), 'o'); xlim([-m m]) ylim([-1.5 1.5]) ylabel('(1/\lambda) [S(y-x)]_n') xlabel('[Dx]_n') title('Optimality scatter plot')
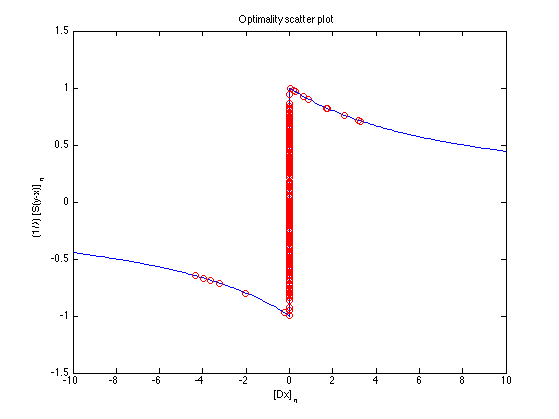
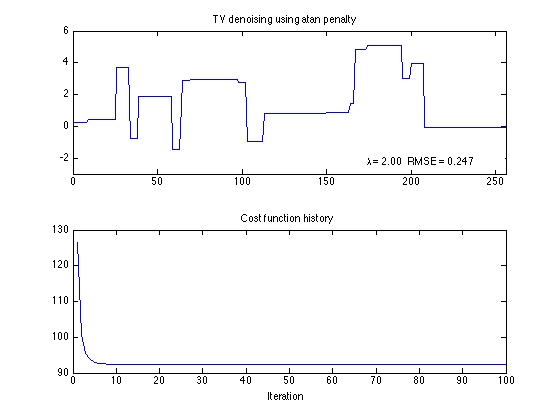
TV denoising using atan penalty
[x_atan, cost_atan] = tvd_ncvx_ver1(y, lam, 'atan', Nit); rmse_atan = rmse(x_atan - s); txt_atan = sprintf('\\lambda = %.2f RMSE = %.3f', lam, rmse_atan); figure(1) clf subplot(2,1,1) plot(x_atan) axis(ax) title('TV denoising using atan penalty'); axnote(txt_atan) subplot(2,1,2) plot(cost_atan) title('Cost function history'); xlabel('Iteration')
Optimality
z = cumsum( x_atan - y ) / lam; a = 1/(4*lam); % maximal value for convexity [phi, dphi, wfun, ds] = penalty_funs('atan', a); figure(1) clf m = 10; t = [linspace(-m, -eps, 100) linspace(eps, m, 100)]; plot(t, dphi(t), diff(x_atan), z(1:end-1), 'o') xlim([-m m]) ylim([-1.5 1.5]) ylabel('(1/\lambda) [S(y-x)]_n') xlabel('[Dx]_n') title('Optimality scatter plot')
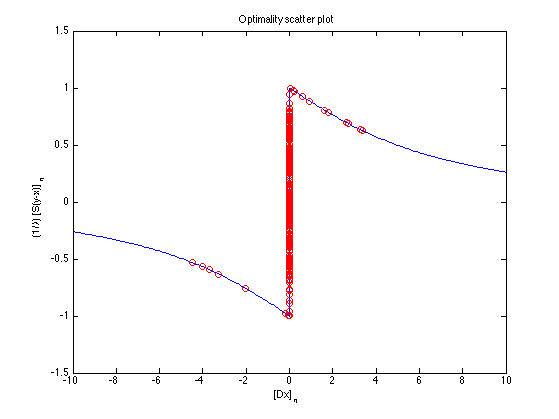
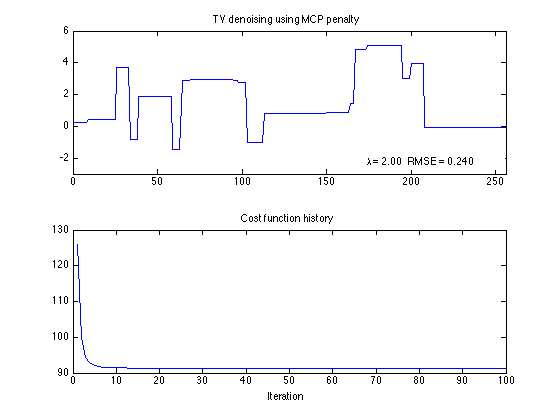
TV denoising using MC penalty
[x_mcp, cost_mcp] = tvd_ncvx_ver1(y, lam, 'mcp', Nit); rmse_mcp = rmse(x_mcp - s); txt_mcp = sprintf('\\lambda = %.2f RMSE = %.3f', lam, rmse_mcp); figure(1) clf subplot(2,1,1) plot(x_mcp) axis(ax) title('TV denoising using MCP penalty'); axnote(txt_mcp) subplot(2,1,2) plot(cost_mcp) title('Cost function history'); xlabel('Iteration')
Optimality
z = cumsum( x_mcp - y ) / lam; a = 1/(4*lam); % maximal value for convexity [phi, dphi, wfun, ds] = penalty_funs('mcp', a); figure(1) clf m = 10; t = [linspace(-m, -eps, 100) linspace(eps, m, 100)]; plot(t, dphi(t), diff(x_mcp), z(1:end-1), 'o') xlim([-m, m]) ylim([-1.5 1.5]) ylabel('(1/\lambda) [S(y-x)]_n') xlabel('[Dx]_n') title('Optimality scatter plot')
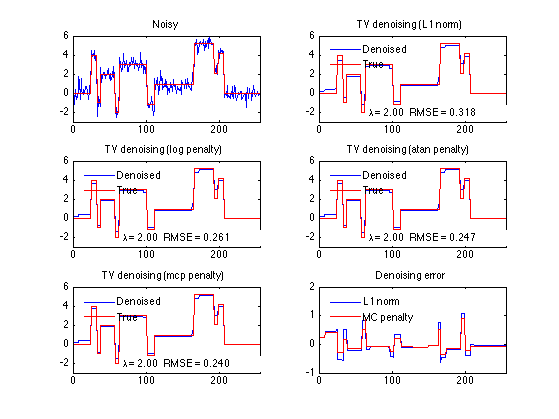
summary
n = 0:N-1; figure(1) clf subplot(3, 2, 1) plot(n, y, n, s) axis(ax) title('Noisy') subplot(3, 2, 2) plot(n, x_L1, n, s) legend('Denoised', 'True', 'location', 'northwest') legend boxoff axis(ax) title('TV denoising (L1 norm)'); axnote(txt_L1) subplot(3, 2, 3) plot(n, x_log, n, s) legend('Denoised', 'True', 'location', 'northwest') legend boxoff axis(ax) title('TV denoising (log penalty)'); axnote(txt_log) subplot(3, 2, 4) plot(n, x_atan, n, s) legend('Denoised', 'True', 'location', 'northwest') legend boxoff axis(ax) title('TV denoising (atan penalty)'); axnote(txt_atan) subplot(3, 2, 5) plot(n, x_mcp, n, s) legend('Denoised', 'True', 'location', 'northwest') legend boxoff axis(ax) title('TV denoising (mcp penalty)'); axnote(txt_mcp) subplot(3, 2, 6) plot(1:N, x_L1 - s, 1:N, x_mcp - s) legend('L1 norm', 'MC penalty', 'location', 'northwest') legend boxoff xlim([0 N]) title('Denoising error') orient landscape print -dpdf Example1
Verify that version 1 and version 2 give the same output signal
penalty_list = {'log', 'atan', 'mcp'};
for i = 1:numel(penalty_list)
pen = penalty_list{i};
[x1, cost1] = tvd_ncvx_ver1(y, lam, pen, Nit); % Algorithm 1
[x2, cost2] = tvd_ncvx_ver2(y, lam, pen, Nit); % Algorithm 2
% Both algorithms give almost the same output signal.
% (Using more iterations leads to more similar output signals.)
max(abs(x1 - x2))
figure(i)
clf
plot(1:Nit, cost1, 1:Nit, cost2)
title(sprintf('TV denoising cost function history [%s penalty]', pen))
legend('Algorithm 1', 'Algorithm 2')
end
ans =
0.0038
ans =
0.0034
ans =
0.0030
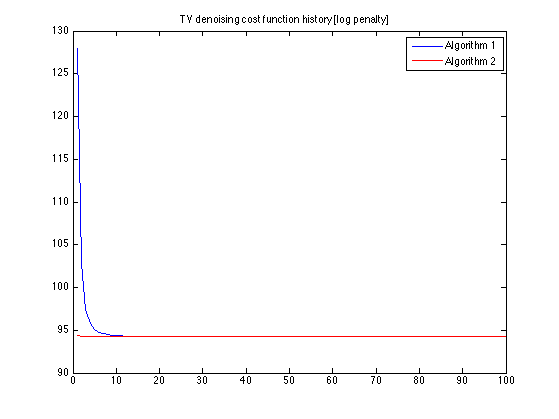
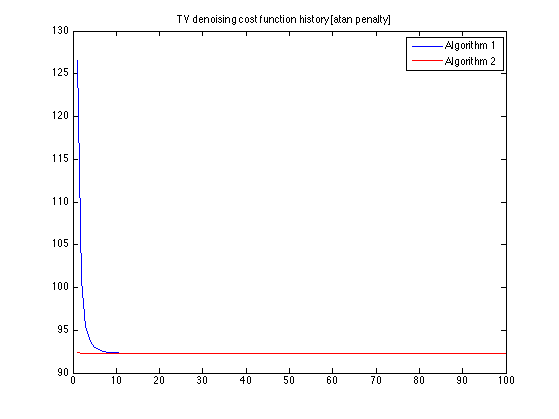
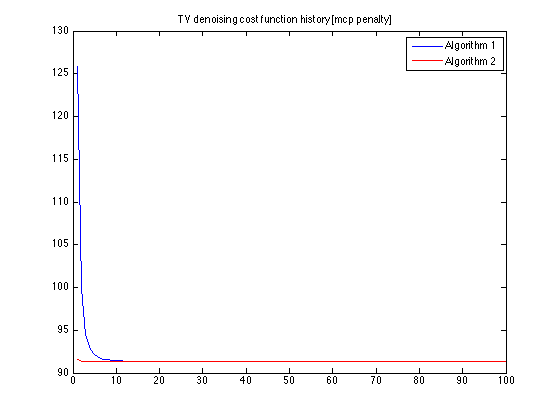
It can be seen that Algorithm 2 converges in fewer iterations than Algorithm 1.